中国初次月球采样是他做的“手臂”!





从仿照人的手臂起头,研发团队阐发关节和臂杆结构的设置装备摆设,为了实现全空间的矫捷活动,关节的度必不成少。
为了确保满有把握,研发团队采纳悬吊法、斜面法等多种手段频频验证,预设各类能想到的毛病逐个测试,将机械臂不竭迭代,趋于“完满”。
从“揽月”,正在押逐航天梦的过程中,梁常春怯于担任,甘于奉献。现在,他正在深空后续探测、小采样、载人月球探测等使命中继续践行航天,为扶植航天强国奉献本人的芳华力量。
“处置航天工做必然要有优良的心态和如履薄冰的义务感,要长于从复杂的工程手艺难题中寻找纪律。”10年前,梁常春第一次听到这句话时就将其深深印正在心底,也践行外行动中。
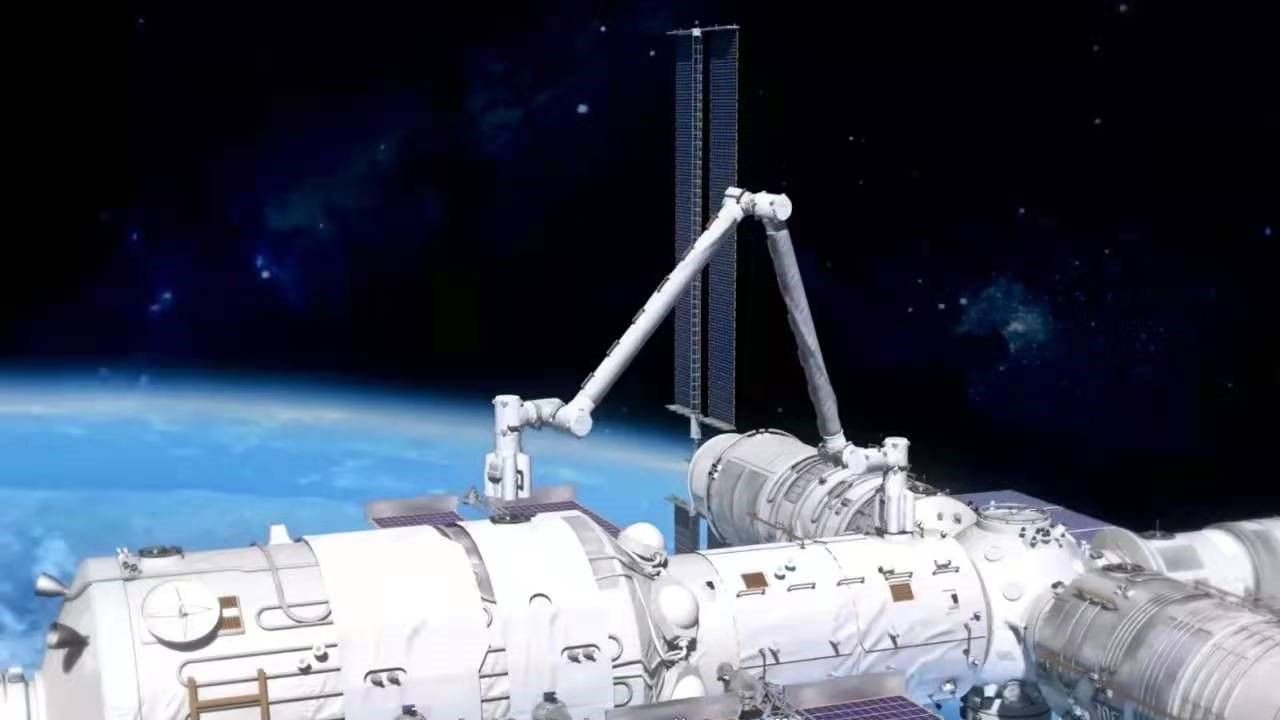
“空间坐机械臂是要正在我国独一的太空尝试室上持久正在轨使用的一套主要智能机械配备,能够完成舱外大范畴巡检、支撑航天员出舱勾当、安拆舱外载荷等多种主要工做,能够说是空间坐概况设置装备摆设的一个矫捷的手臂。”梁常春说。
2020年11月24日,嫦娥五号成功发射,飞向月球。12月1日,嫦娥五号成功落月,并将为时48小时的月壤采集使命。
为此,雷同零沉力若何模仿、如何让无限的臂长笼盖大范畴的舱段功课区域等,都成为研发团队需要逐个霸占的难题。


十年来,梁常春先后研发嫦娥五号机械臂和载人空间坐机械臂,让中国智制“百变神臂”遨逛太空,逐梦航天!

对梁常春而言,取航天结缘,源于一场斑斓的“不测”。而恰是此次“不测”,令梁常春十年磨“两剑”,研制出矫捷而无力的“百变神臂”,正在太空中“予取予求”。
大白使命的艰难而主要,梁常春情里冲动而忐忑。他冲动于深度参取国度航天严沉工程的分量和意义,又忐忑于本身经验的远远不脚,需要尽快转换心态和脚色,驱逐挑和和。
梁常春曾描述说,“两根臂杆展开后正在舱表爬行时,仿佛就是一个庞大的圆规正在空间坐概况辗转腾挪。”。
从中国数十年航天工程的深挚堆集中,探测器等航天器的复杂机电安拆中,梁常春寻觅到可资自创的贵重经验,并充实调研“凤凰号”等国外型号的采样系统,虽然正在后者上见效甚微。
从机械臂长度和挪动体例等方面动手研发,梁常春也曾考虑过国际空间坐所利用的挪动导轨,但发觉其并不合用中国空间坐。
中国载人空间坐机械臂体型复杂,有十米长、七个关节,既能搬运25吨严沉舱段,又能快速速度很大的悬停飞翔器,被称做是“矫捷的大胖子”。
梁常春说,正在月表1/6沉力特殊的使用中,采集、抓取、转移等高精度的动做要求,都对机械臂节制系统提出高要求。
梁常春一步步推导、攻关,本人编写几千行MATLAB法式代码,构成了空间机械臂节制算法的第一代SIMULINK模子库,其霸占了高精度视觉伺服容器抓取取转移手艺,处理了嫦娥五号的多点不确定地形采样取容器高精度转移难题。
嫦娥五号是中国嫦娥探月工程中首颗地月采样往返探测器,是“绕、落、回”中的第三步,此中环节使命就是实现月面无人采样并前往地球。
全神贯注盯着屏幕上的月面采样及时影像,钻土、铲土、挖土、夹土、放土……机械臂的每一个动做,梁常春都既熟悉又“目生”。熟悉的是,这些动做他曾多次机械臂完成;“目生”的是,现在这些动做是正在月球上实正在上演完成。

正在梁常春看来,空间坐机械臂最次要的特色就是“爬行”功能,“团队操纵起码的资本和价格,正在无限臂长的根本上实现了整坐功课区域的笼盖,是一大立异。”。
然而,研制过程难以避免了诸多现实窘境。“对于我们国度而言,其时髦没有雷同一种机械臂正在星表的使用经验,从工程角度来讲确实是从无到有的过程。”梁常春说。
若何实现机械臂正在舱体上笼盖“爬行”?无意间,团队从圆规中获得灵感,将机械臂立异设想成具有两只脚(手),即结尾施行器,和一个大脑,即地方节制器的布局。
梁常春说,嫦娥五号机械臂的次要功能就是用来正在未知的月表下完成从动采样、封拆以及样品转移这一系列复杂动做,需要正在无限的时间窗口内采集更多的月壤样品。
为此,空间坐机械臂设想成七个关节,即实现七个度,正在每个关节上都设置有丰硕的传感器和电,正在太空中可以或许实现雷同人类手臂的活动能力。
“团队每个正在茶余饭后城市思虑,这个机械臂到底长成什么样子才是合理的?”梁常春给出谜底:都雅的往往都是合理的。
2016年,正在研发嫦娥五号机械臂的同时,梁常春起头担任中国“天宫”载人空间坐大型机械臂节制系统担任人。
日复一日,年复一年,正在无数次推倒沉来的“归零”中,梁常春率领团队一轮轮迭代优化,誓言做到“世界最好”。现在,空间坐机械臂可以或许完成舱外巡检、辅帮航天员出舱功课使命等各项使命,正在手艺、功能等方面达到世界先辈程度。
2012年,梁常春从同济大学机械设想制制及从动化专业硕士结业。恰是结业前一场偶尔加入的中国航天科技集团宣讲会,燃起梁常春的航天胡想。

“地方节制器做为整臂的大脑,”梁常春说,机械臂对称设置装备摆设,能够首尾交换?。